Contact Person: Kostoglou M. [kostoglu@chem.auth.gr], Chanoumidou C. [chrysanthi.chan@gmail.com]
An innovative device has been developed for the evaluation of the wetting/dewetting behavior of complex (structured, rough, porous, etc) substrates driven by body forces.
The device offers two major novel features: it provides simultaneous rotation and tilting of the substrate where the droplet is placed, and at the same time it permits real-time monitoring of the droplet shape and movement by three Wi-Fi cameras viewing the droplet from X-Y-Z directions. This enables the independent control of normal and tangential forces allowing a better understanding of the wetting properties of liquid/solid systems.
In Figure 1, the whole device is shown. Several rotation and tilting modes can be selected and customized by the user from the HMI tactile screen. The phenomena involving deformation and droplet movement can be seen in real time in a PC.

Figure 1: Innovative device for the study of complex substrates wetting driven by body forces
Figure 2 shows a close-up view of the data acquisition section with cameras and lights orthogonally distributed around the substrate. All the elements rotate and tilt together with the substrate/liquid system under examination monitoring the whole process.
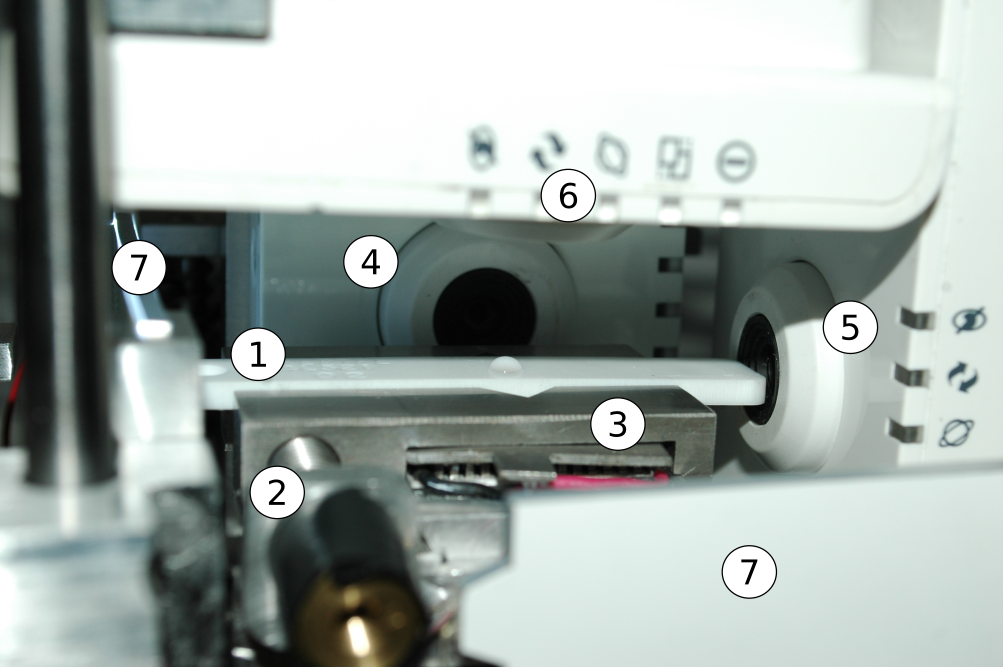
Figure 2: Close-up view of the data acquisition section. 1. Substrate; 2. Screw for substrate holder; 3. Substrate holder. 4. Side camera, 5. Back camera; 6. Top camera; 7. LED panels.
Video 1: Rotation
Preliminary results together with technical details of Kerberos and a supporting theoretical model were published in [1]. Since then, many improvements have been made in the image acquisition and processing. A custom made software was developed for the automatic processing of the video stream. This software analyzes the images and provides information related to 2D geometrical features, based on the individual processing of side and top images, such as contact angles, length, height, width and contour points. Besides, it provides 3D reconstruction of the droplet shape combining top and side images. Thanks to this new software, the evolution of the droplet shape can be examined with detail as a function of the force input in Kerberos.
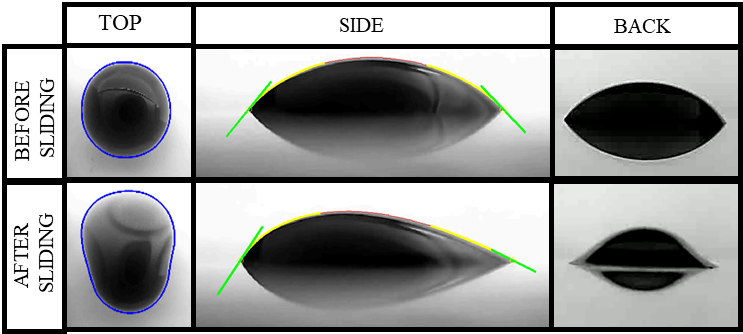
Figure 3. Example of the views from top, side and back cameras before and after sliding. Blue lines represent contours in the top view. Red lines represent contour in the side view. Green lines represent contact angles.
Experiments were recently performed to study the spreading/sliding behavior of different volume water droplets over glass under combined tangential and normal forces. As shown in Figure 4, spreading is the first stage in which the droplet partially moves. Only the front part moves with the advancing contact angle (θA) while the rear stays pinned in place. Sliding occurs at higher rotation speeds and during this stage all the droplet is set on motion attaining advancing and receding (θR) contact angles with the substrate.
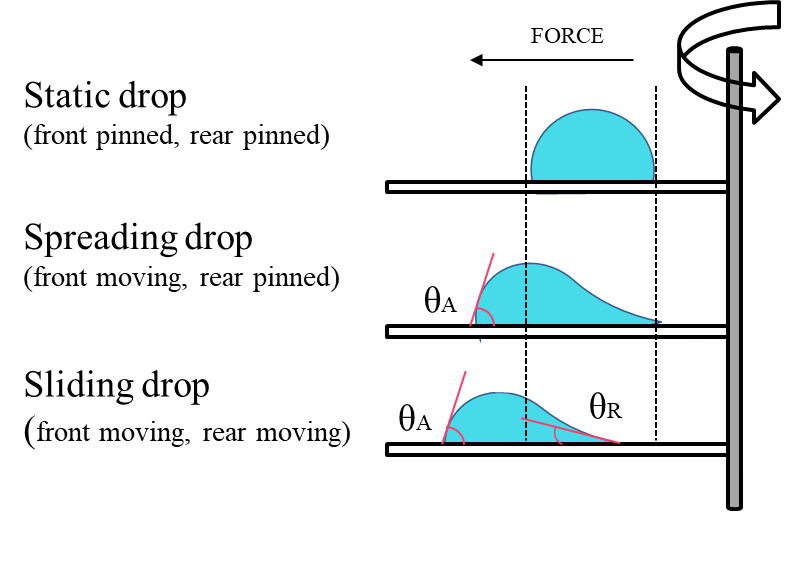
Figure 4. Definition of spreading and sliding for a droplet on top of a surface under centrifugal forces. θA advancing contact angle, θR receding contact angle.
An example is presented in Figure 5 for a 30µL droplet spreading/sliding on a horizontal substrate and on an initially tilted substrate. The experiments are performed between the critical speeds for the beginning of spreading and sliding in increments of 5 rpm. The initial tilting is made so that gravity and centrifugal forces act in opposite directions. The force required for the droplet to slide over a tilted substrate will be higher than over the horizontal one.
Figure 5a presents the evolution of the front (θ1) and rear (θ2) contact angles with time. It is shown that, for all runs above the critical spreading rotation speed (30 rpm), the front edge of the droplet forms an angle with the solid surface which is equal to the advancing contact angle, θA (dashed lines). However, the rear edge of the droplet is pinned for rotation speeds under 50 rpm (solid lines). In these cases, the rear edge has not reached yet the value of the receding contact angle, θR. The rear angle decreases as the rotation speed increases until the receding angle value is reached at 50 rpm. At that rotation speed, the droplet detaches altogether from the surface and slides in the direction of the force.
In Figure 5(b) the evolution of advancing and receding contact angles versus time can be observed for a 30 µL droplet over an initially tilted substrate (15º). In this case, the critical rotation speeds are 50 and 65 rpm for spreading and sliding respectively.
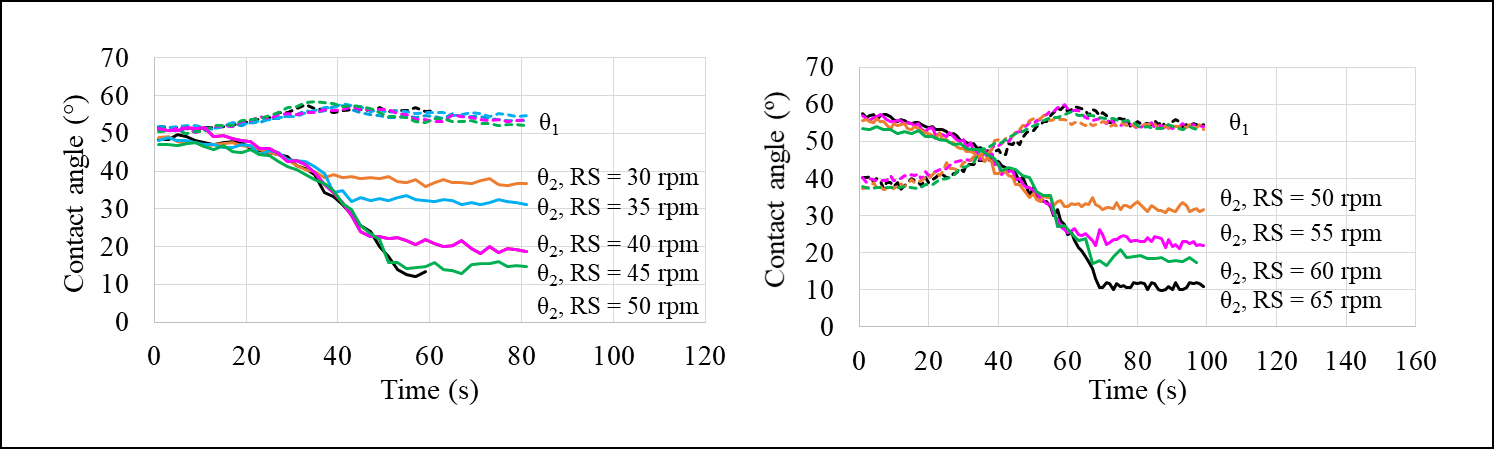
Figure 5. Spreading/sliding behavior of a 30 µL droplet for different target rotation speeds (RS). Front (dashed lines) and rear (solid lines) contact angles versus time for (a) horizontal substrate, (b) initially 15 degrees tilted substrate.
It is noticed that for the droplet on the horizontal substrate has a symmetric shape (equal front and rear contact angles) whereas the droplet placed in the tilted surface is deformed due to gravity. For the droplet over a horizontal surface, the sliding occurs at 50 rpm but introducing 15 degrees of initial tilting, the sliding happens at 65 rpm.
Processing of the acquired video streams provides also the side and top view contour points of the droplet shape. Inspection of the shape contour evolution with time enables a physical representation of the droplet shape deformation during spreading and sliding. Figure 6 displays the evolution of the shape contours of a 20 µL droplet sliding at 60 rpm. These contours represent experimental top and side views for selected representative frames (time instants). At first, a spreading stage is noticed from the moving front edge and the pinned rear edge of the droplet. Next, as the force gradually increases the droplet detaches from the substrate and slides in the direction of the force.
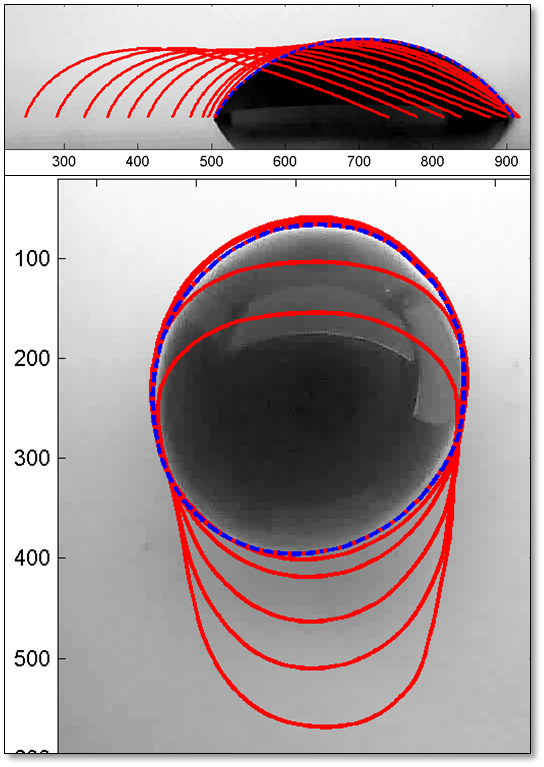
Figure 6. Side and top view of the experimental contour evolution during the sliding of a 20 µL droplet at 50 rpm on a horizontal substrate.
[1] S.P. Evgenidis, et al., Kerberos: A three camera headed centrifugal/tilting device for studying wetting/dewetting under the influence of controlled body forces, Colloids Surf. A: Physicochem. Eng. Aspects (2016), doi